For this project, I will be using an amateur television link to provide video feedback from the rover's point of view, as well as telemetry data overlaid on top of the image. The small video transmitter I have available should be sufficient to send a signal a good distance away, and has an audio channel available, which I might use for sending packetized data as well.

The Videolynx Z70A ATV transmitter
The Videolynx Z70A has an output of 50 to 100 mW on the 70cm (440 MHz) ham band. Using this band simplifies reception quite a bit, since the image can be received by any television with an analog CATV (cable TV) tuner built in. This band is also quite removed from the frequencies that the control system will be using for communications, so there will hopefully be no problems with crosstalk or swamping.

The BOB-4 video overlay unit, on a carrier board
For video overlay, I will be using a BOB-4 Video OSD module from Decade Engineering. This is a very capable module which, while a bit larger than some on-screen display units, allows for the use of halftone video and graphic elements. It is available in both SIMM and 0.10" header form-factors, depending on your particular application. As you can see in the photo above, I purchased the SIMM version before deciding that what I really needed was a header-based connection. Some creative soldering did the trick though, and it now occupies less space than before, while retaining all of its functionality.
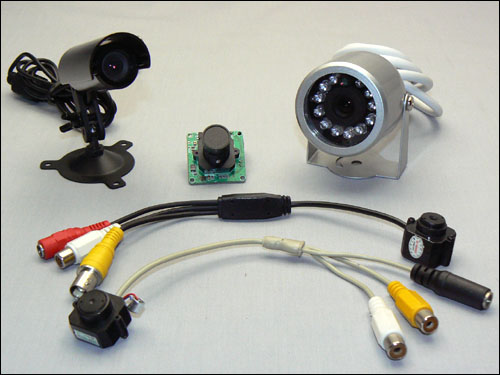
An assortment of small video cameras from the parts bin
For capturing the video in the first place, I have a number of small video cameras available. I'll be using a micro camera of one type or another, in the interest of keeping it light and mobile. Many smaller inexpensive cameras have lower resolution, but I figure I can start out simple and work my way up to better units as things progress.
In the next installment, I'll briefly discuss some of the sensors I'll be using onboard the rover, and then it will be on to the actual building process!


